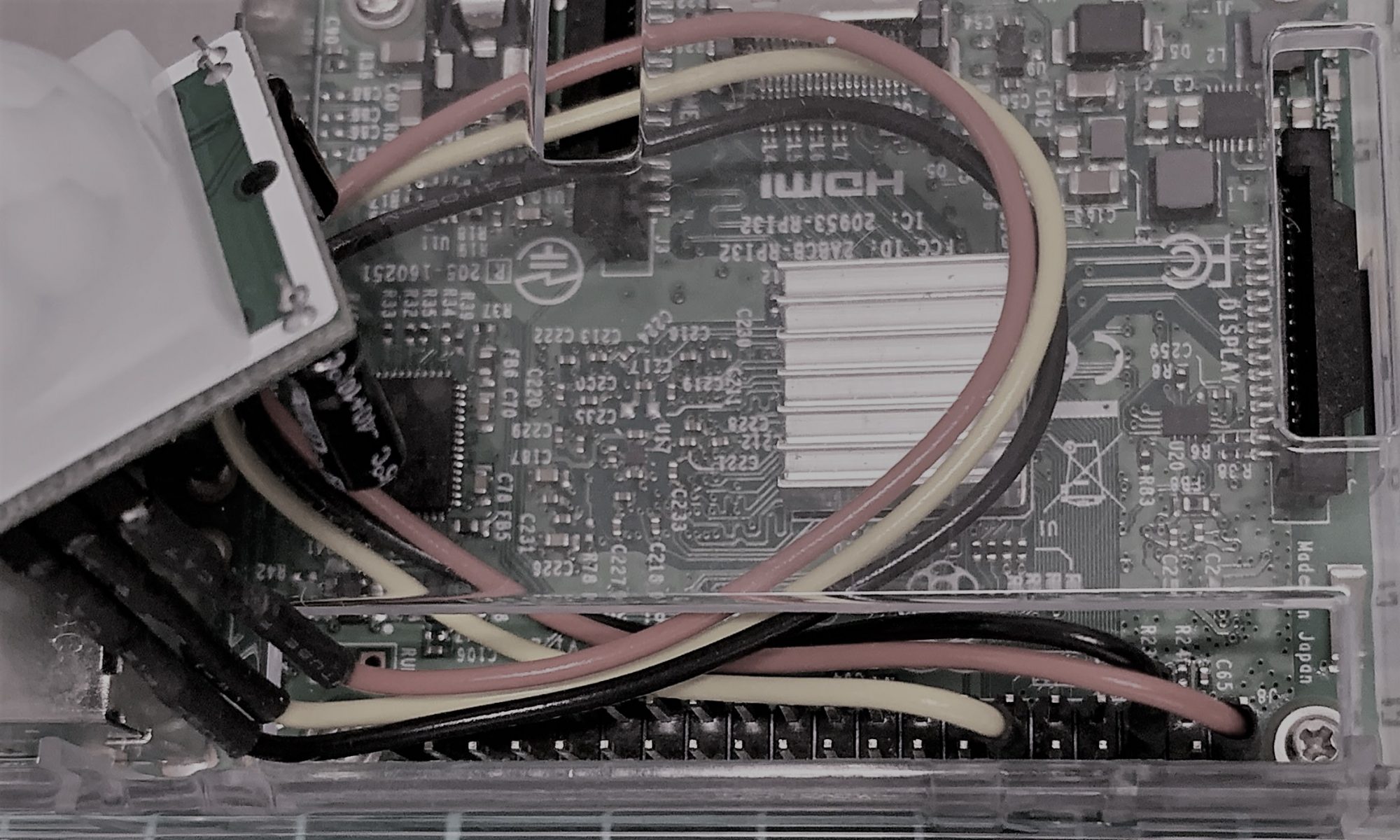
今回はラズパイには関係ないのですが、風力歩行ロボット「ストランドビースト」を組み立てたので紹介します。風のエネルギ―を機械エネルギーに変えて進むロボットです。ラズパイとモータなんか組み合わせるとおもしろい物ができそうなので、まずは風力歩行ロボットを作ってその原理を学んでみました。
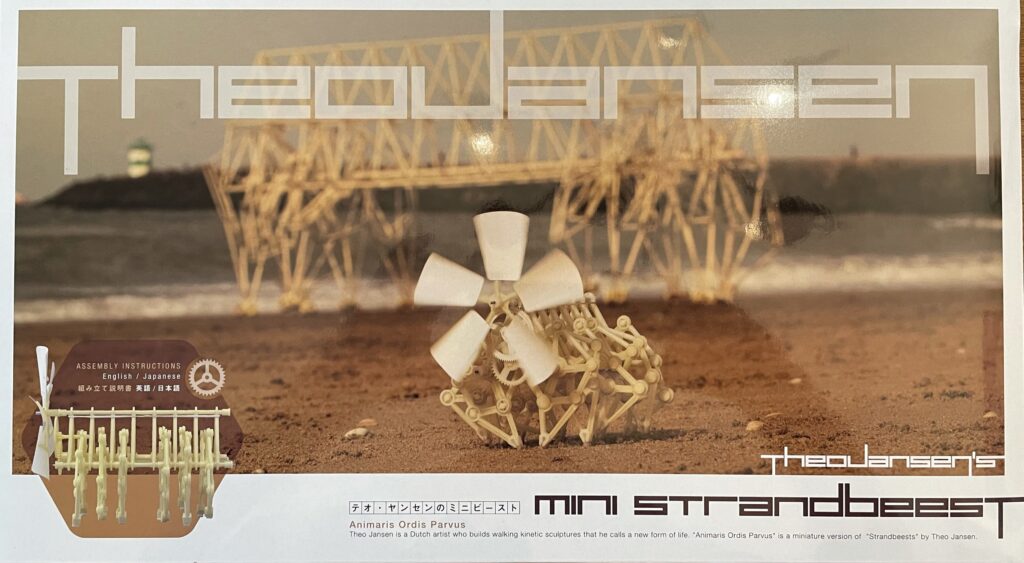
今回作ったのはテオ・ヤンセンの「ミニビースト」です。前面のプロペラで風を受けて横方向に歩きます。
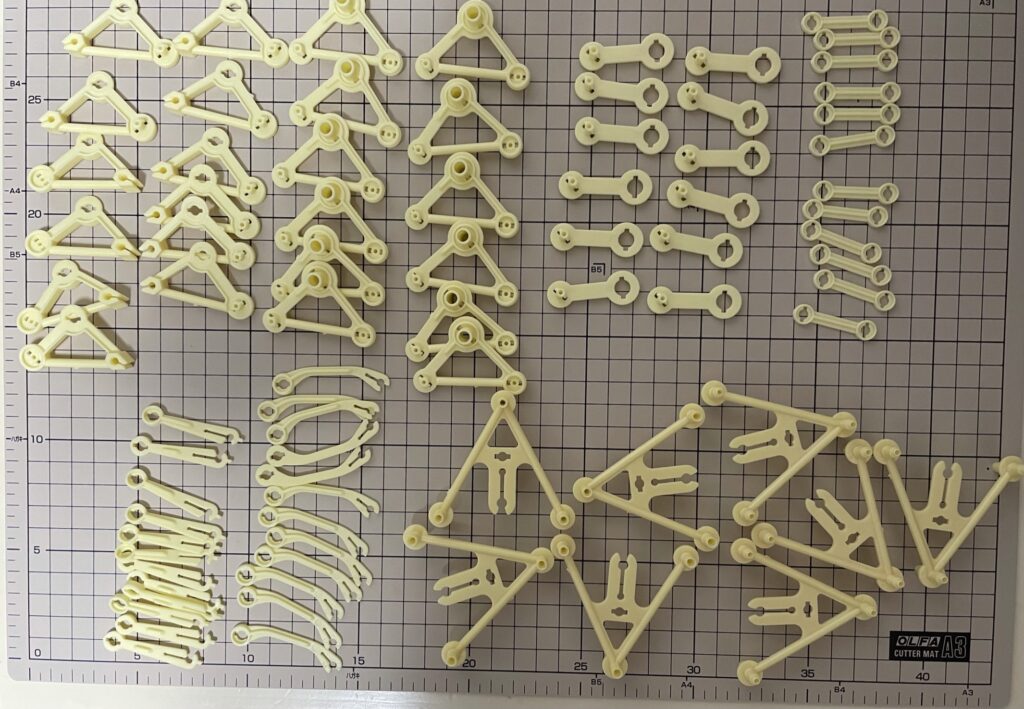
箱の中身です。各パーツがビニール袋に入っているので、袋から出して各パーツを取り外していきます。

取り外したパーツは以下です。結構パーツが多いことに気づきます。組み立て説明書に記載されている組み立て所要時間は約1.5時間と記載されているので心して取りかかります。
細かい部品はなくならないように箱に入れておくと安心です。

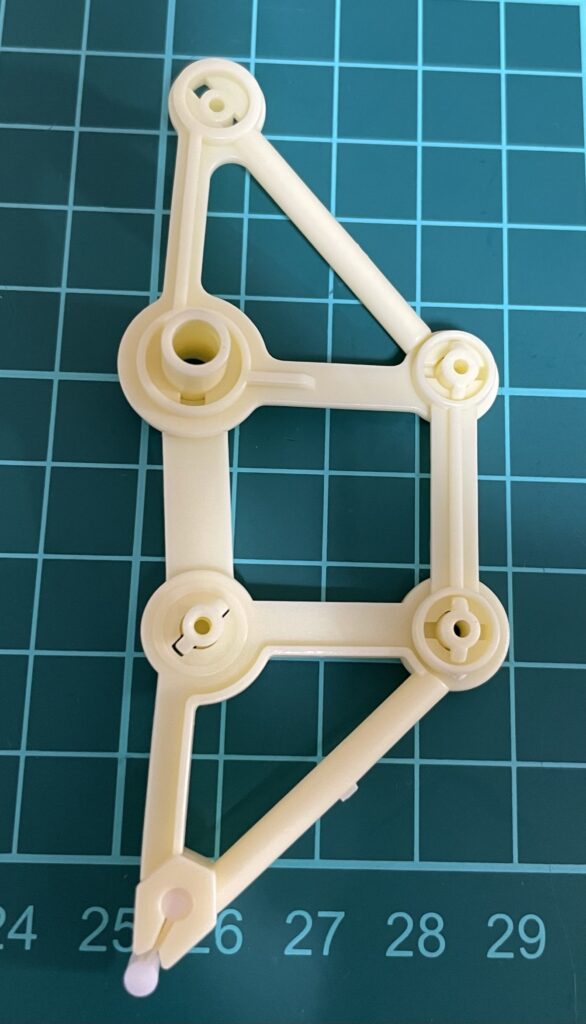
以下がビーストの脚を組み立てた状態です。ホーリーナンバー(13の数字)を用いて足の各部を円運動させることで、生き物らしい足のなめらかな動きを実現します。
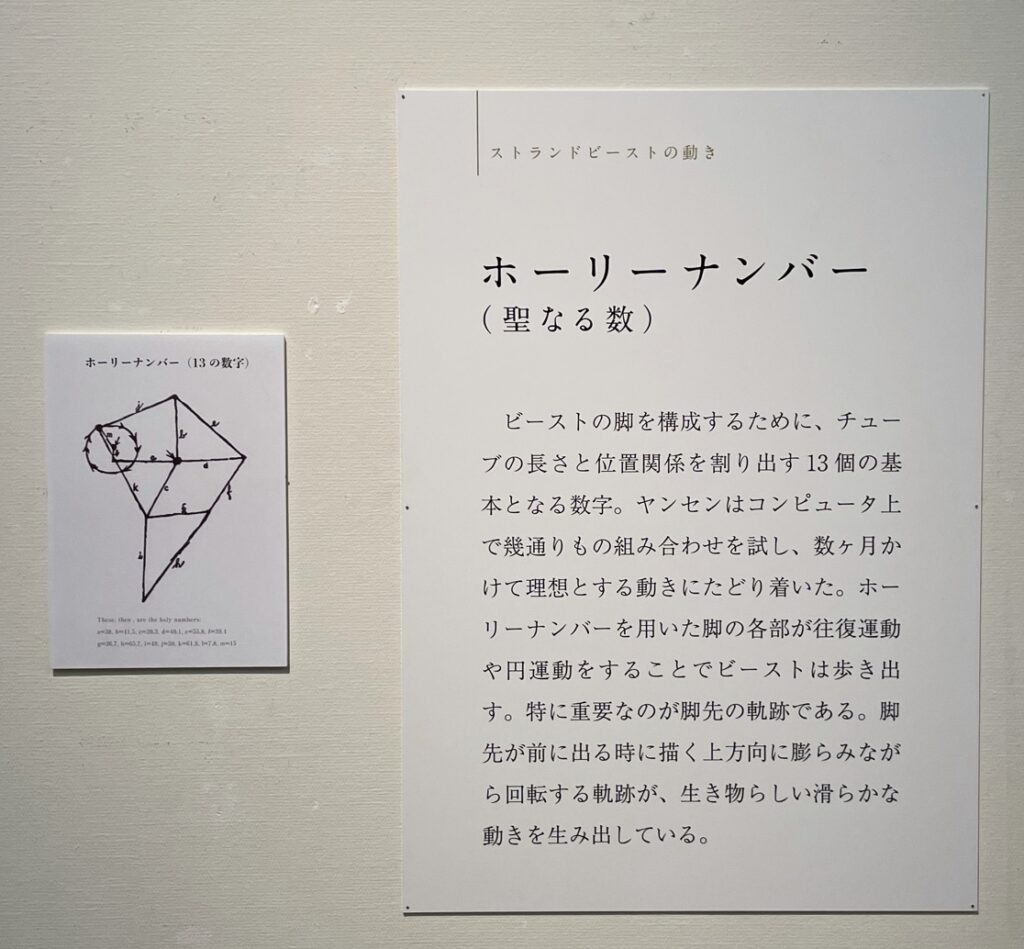
ホーリーナンバーとは、ビーストの脚を構成するために、チューブの長さと位置関係を割り出す13個の基本となる数字です。この計算に基づいてビーストは動作しています。
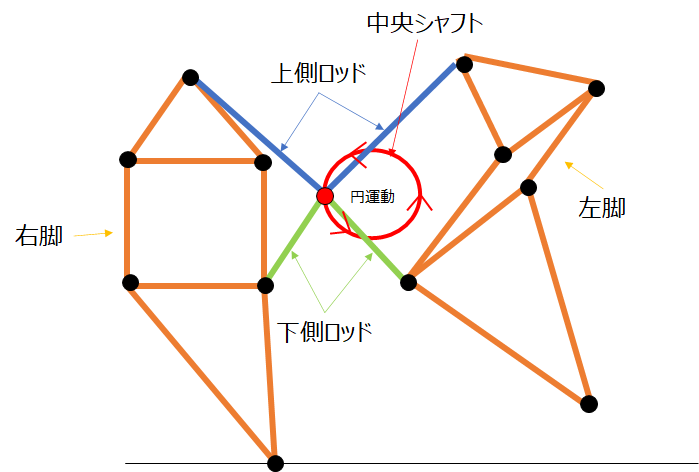
先程作成したビーストの脚を上下のロッドで中央のシャフトに接続します。シャフトの円運動を利用して、ビーストの脚が動き出し横方向に進みます。両足のパーツを組み立てて、上下ロッドを順番に取りつけてから、ゆっくりシャフトを動かすとその動きに感動します。
実際にホーリーナンバーを使った円運動を確認した動画です。やっぱり実際の動作を見た方が理解しやすいです。テオ・ヤンセン展の展示会にあったので動かしてみました。
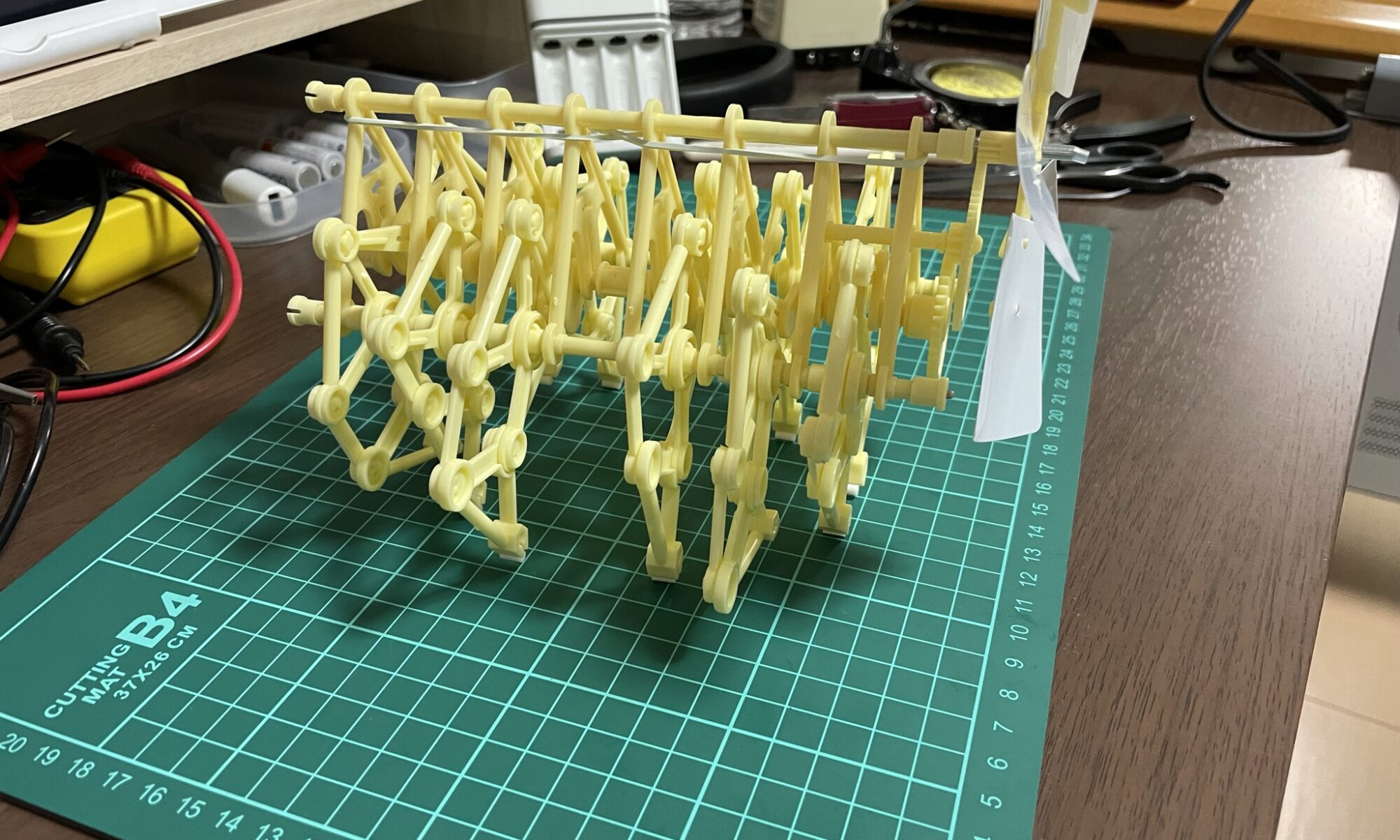
全ての脚をシャフトに取り付けて、左右の脚が三対六脚×2を組みつけた状態です。ロッドをシャフトにつなぐ順番を間違えないように注意して組み上げます。組み上げたらシャフトを回して、脚がスムーズに動くか確認できればOKです。実際に作って動作させることで。複雑そうに見えた足の動きが少しだけ理解できた気がします。
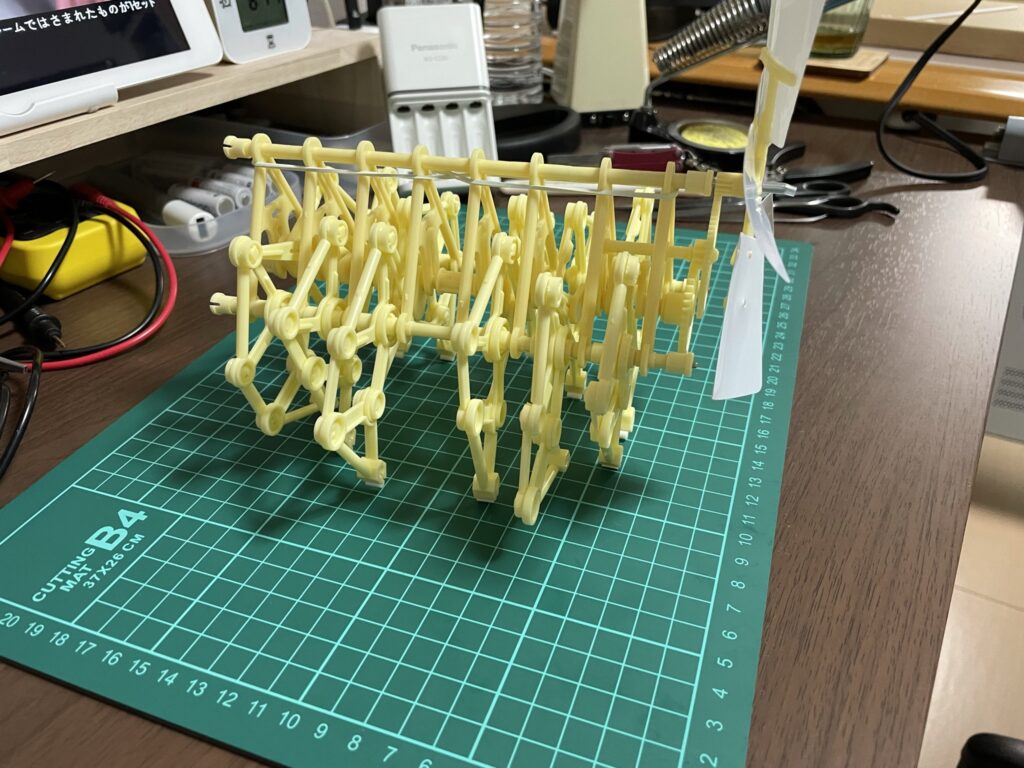
前面からうちわで扇いでスムーズに動いてくれました。
近くの海にも連れていくと、自然の風で動いてくれました。
それにしてもこのミニビーストは良くできていますね。センサとモータを組み合わせて、物を避けながら動くミニビーストなんて面白そうですね。
Follow me!